Overview
Chapter 7 研究 solution curves 的定性行为。核心问题有四个:
- Equilibrium / Critical points:系统在哪些点不动;
- Stability:从这些点附近出发,轨道会靠近、远离,还是绕着转;
- Linearization:复杂 nonlinear system 在 critical point 附近,常常可以先看 Jacobian 对应的 linear system;
- Ecological interpretation:predator-prey / competition / cooperation 等模型里,critical points 与 phase portrait 直接决定长期种群命运。
Contents
- Overview
- Contents
- Equilibrium Solutions and Stability
- Stability and the Phase Plane
- Linear and Almost Linear Systems
- Ecological Models: Predators and Competitors
- Example
Equilibrium Solutions and Stability
Autonomous first-order equations
最简单的非线性情形是
这叫做 autonomous first-order differential equation,因为右端不显含 。
这类方程的优势是:
只看 的符号,就能读出解的方向与长期行为。
Critical points and equilibrium solutions
若
则常值函数
满足方程,因此:
- 叫做 critical point;
- 叫做 equilibrium solution。
所以一维自治方程的第一步永远是:
先把所有 critical points 找出来。
Stability in Lyapunov’s sense
设 是一个 critical point。
-
stable,如果对任意 ,都存在 ,使得
蕴含
-
若不满足这个条件,则称为 unstable。
几何上:
从 equilibrium 附近出发的轨道,若一直 stay nearby,则这个 equilibrium 是 stable 的。
若更进一步有
则它叫做 asymptotically stable。
One-dimensional phase line
对
做 phase line 的步骤非常固定:
- 解 ;
- 在各区间判断 的正负;
- 用箭头表示解的运动方向:
- :箭头向右;
- :箭头向左。
因此:
- 两侧箭头都指向 critical point stable,通常还是 asymptotically stable;
- 两侧箭头都远离 critical point unstable;
- 一侧靠近、一侧远离 semistable。
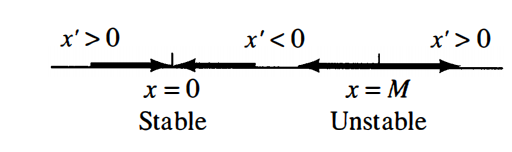
Logistic equation
考虑 logistic equation
Critical points
令右端为 0:
得到
Phase line and stability
设
分区间判号:
- 时,;
- 时,;
- 时,。
- 是 unstable;
- 是 stable,实际上还是 asymptotically stable。
Explicit solution and long-time behavior
若 ,则
因此:
- 若 ,则
- 若 或 ,则停在对应 equilibrium;
- 若 ,则分母会在有限时间变为 0,解发散到 。
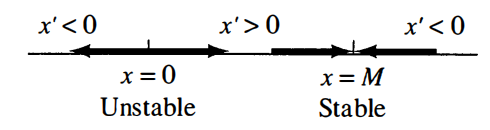
Explosion/Extinction Equation
现在把 logistic 中的符号反过来,考虑
它仍有两个 critical points:
但 phase line 完全不同。设
分区间判号:
- 时, 且 ,故 ;
- 时,;
- 时,。
所以 phase line 为
于是:
- 是 stable;
- 是 unstable。
若用显式解
可进一步得到:
- 若 ,则 ;
- 若 ,则恒等于 ;
- 若 ,则在有限时间 blow up 到 。
同样是两个 critical points,稳定性可能因为一个符号变化而完全翻转。
Logistic population with harvesting
带 harvesting 的 logistic 模型写成
a 也可写成
其中:
- 是自然增长;
- 是每单位时间固定 harvest 的个体数。
Critical points and threshold
令右端为零:
当
时,有两个实根:
并且
此时方程可因式分解为
于是 phase line 是
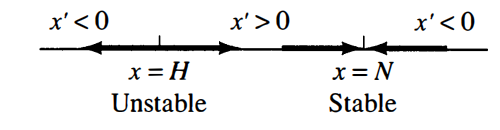
因此:
- 是 unstable;
- 是 stable。
这里 很重要,它叫做 threshold solution:
- 若 ,则解最终趋于 ;
- 若 ,则种群会被捕捞拖向灭绝。
所以 不是长期极限,而是“分界线”。
Three parameter regimes
Case 1:
有两个不同实根 。
- unstable;
- stable;
- 若 ,则 ;
- 若 ,则种群灭绝。
Case 2:
两个根合并成一个:
这时
phase line 为
因此 是 semistable:
- 从右边看,解靠近它;
- 从左边看,解远离它。
Case 3:
没有实根,因此没有 equilibrium solutions。
这时自然增长项的最大值也不足以抵消 harvesting,系统对所有初值都会走向灭绝。
Concrete example
若取
则模型为
二次方程
给出
若 的单位是 “hundreds of fish”,则:
- threshold population = 100 fish;
- new limiting population = 300 fish。
所以:
- 初始鱼群多于 100 条,长期趋于 300 条;
- 初始鱼群少于 100 条,会被完全捕捞掉。
Bifurcation and Dependence on Parameters
当我们把 当成连续变化的参数时,critical points 的数目会发生突变:
- :有两个 critical points;
- :只有一个 semistable critical point;
- :没有 critical points。
这种参数连续变化,而系统的 qualitative behaviour 突然改变的现象,叫做 bifurcation。
在方程
中,critical points 满足
等价地可写成
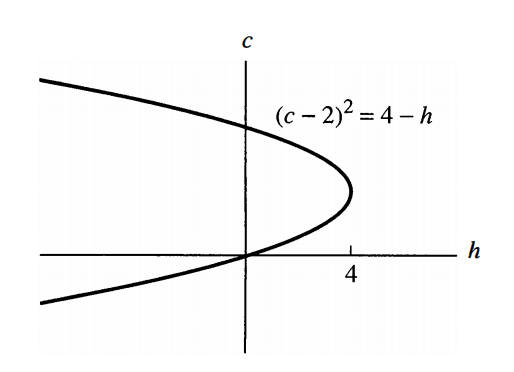
这是一条抛物线,给出了所有“参数 与对应 equilibrium ”的关系,这张图就叫 bifurcation diagram。
critical points 的位置、数目与稳定性都可能依赖于参数;当参数穿过某个临界值时,系统结构会突然改变。
Stability and the Phase Plane
From one-dimensional phase line to phase plane
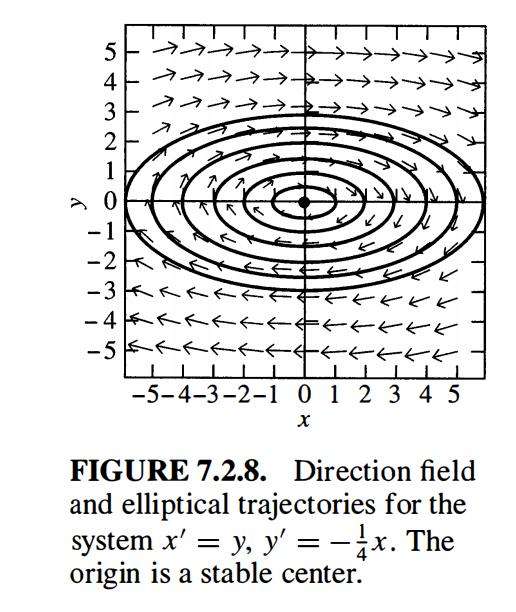
二维自治系统写成
这时未知量不再活在一条数轴上,而是活在 xy phase plane 里。
与 1D phase line 相比,2D phase plane 的轨道行为更复杂。轨道可以:
- 靠近 critical point;
- 远离 critical point;
- 围着 critical point 转圈;
- 螺旋地靠近或远离;
- 甚至趋向某个 closed orbit / limit cycle。
通过 phase portrait 来判断 trajectories 在 critical points 附近如何运动。
Critical points in the plane
若
则 是系统的 critical point / equilibrium point。
求 critical points 的办法仍然非常朴素:
解这个代数系统。
Stable vs. asymptotically stable
对二维系统,Lyapunov stability 的定义和一维本质相同,只是现在的距离要用二维向量来理解。
几何上:
- stable:从 nearby point 出发的轨道始终 stay close;
- asymptotically stable:不仅 stay close,而且随着 真正靠近 critical point;
- unstable:从 nearby point 出发会被甩开。
这里要特别注意:
在二维系统里,stable 不一定 asymptotically stable。
因为轨道可能只是绕着 critical point 转圈,不会跑远,但也不会收敛进去。
典型例子就是 center。
Typical local behaviors
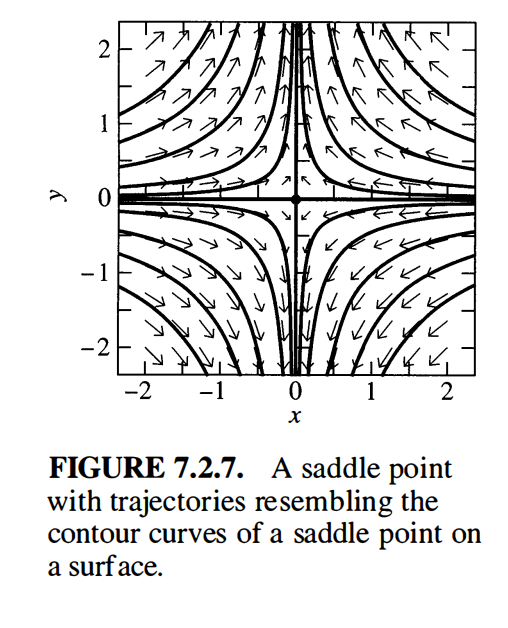
Saddle point
- 某些方向靠近,某些方向远离;
- 一般是 unstable。
Node
- 轨道大致沿若干方向一起流向或远离 critical point;
- 若都流入,则 stable / asymptotically stable;
- 若都流出,则 unstable。
Center
- 附近轨道是闭曲线,围着 critical point 打转;
- stable but not asymptotically stable。
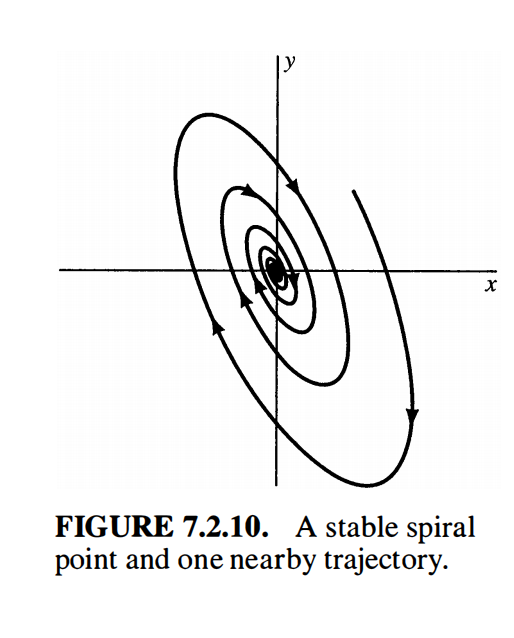
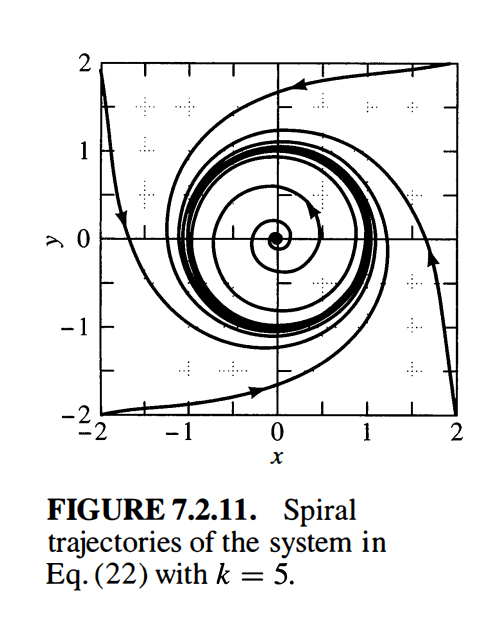
Spiral point
- 轨道螺旋式进入或离开 critical point;
- inward spiral 是 stable 且 asymptotically stable;
- outward spiral 是 unstable。
Limit cycle
- 轨道不趋向 critical point,而是趋向一个 closed trajectory;
- 这是二维 nonlinear system 里很有代表性的现象。
Examplee
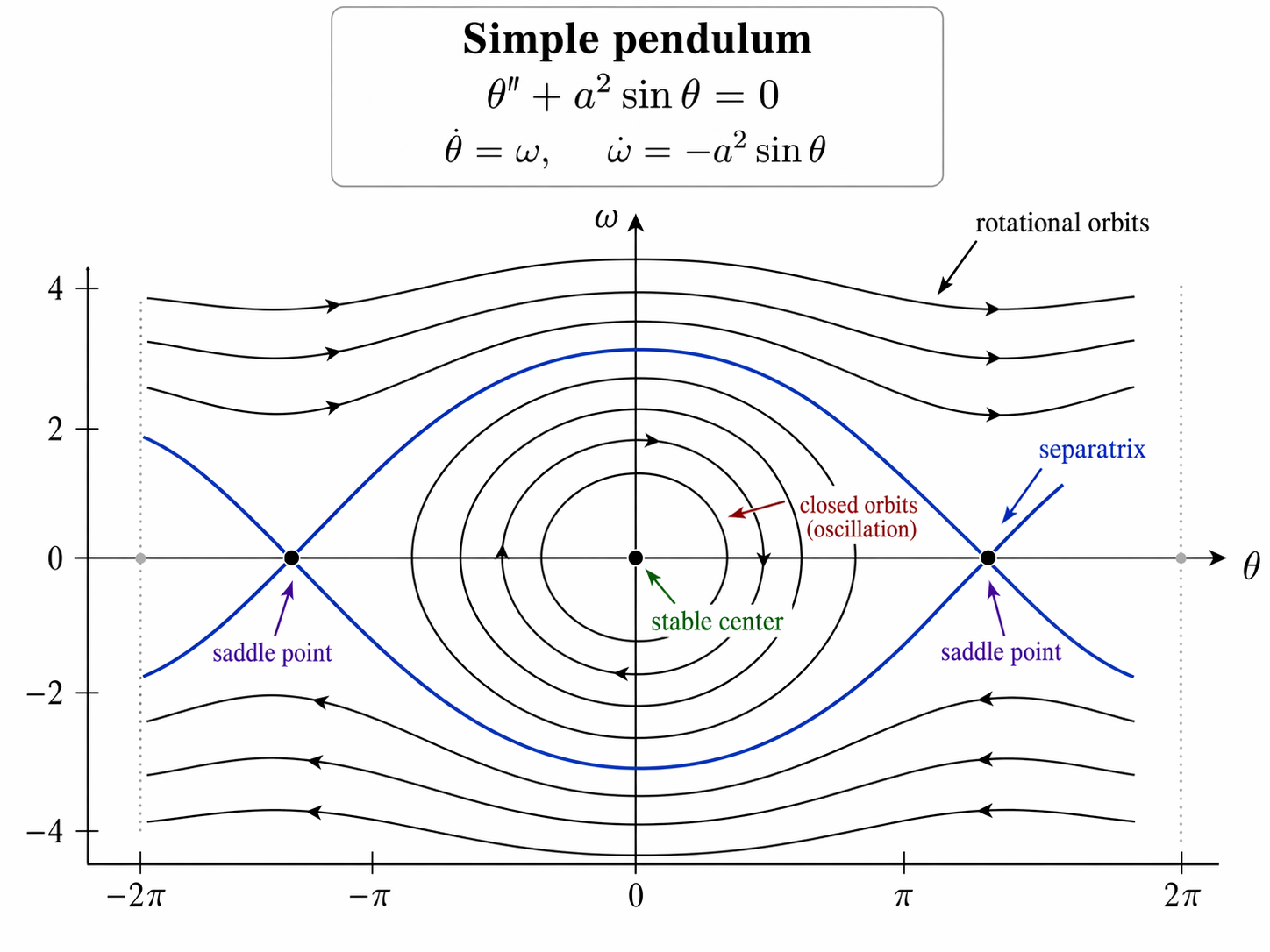
a simple frictionless pendulum
课上额外讲了 simple pendulum:
令
则可改写为二维自治系统
这是一个典型的 2D phase-plane model。
物理解释
- :摆角;
- :角速度。
相图的三类典型轨道
- 小振幅闭轨道:对应来回摆动;
- 外侧开轨道:对应连续转圈;
- 经过 saddle 的 separatrix:分隔“摆动”和“转圈”两类行为。
因此 simple pendulum 是理解 phase portrait 的极好例子:
同一个系统里,closed orbit、saddle、separatrix 都会同时出现。
Linear and Almost Linear Systems
Linear systems and linearization
先看二维线性系统
也就是
对于一般 nonlinear system,如果 是一个 critical point,那么总可以先做平移
把 critical point 移到原点,再在原点附近用 Jacobian 做 linearization:
因此:
研究 nonlinear system 在 isolated critical point 附近的行为,第一步往往就是看 Jacobian 的 eigenvalues。
Three canonical cases
二维线性系统在 Jordan canonical form 下归成三类:
Case I
对应两个实特征值。轨道满足
以及坐标轴方向上的特解。
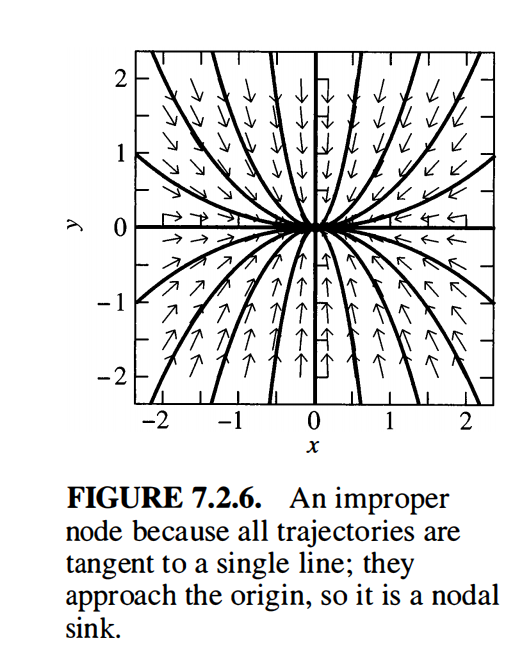
Case II
对应重特征值但只有一个 eigenvector 的 Jordan block。
典型轨道会表现为 improper node。
Case III
对应共轭复特征值
此时相图是 center 或 spiral。
Classification by eigenvalues
对
特征值为
因此 classification 完全取决于:
- 特征值是 real 还是 complex;
- 是否 equal;
- real part 的 sign 是 positive 还是 negative。
常用分类总结
- 两个实特征值,异号
则是 saddle point,一定 unstable。
- 两个实特征值,同号
- 都负:stable node;
- 都正:unstable node。
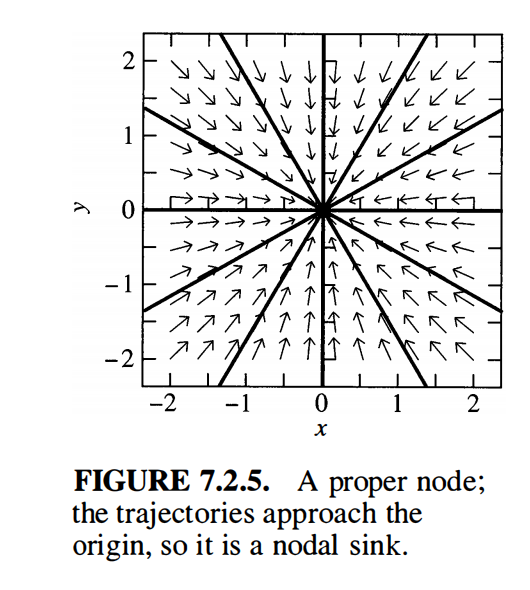
distinct same-sign real eigenvalues 常表现为 improper node;
若 repeated eigenvalue 且有两条独立特征方向,则常表现为 proper node / star。
- 一对复共轭特征值
- :stable spiral;
- :unstable spiral;
- :center(线性系统里 stable but not asymptotically stable)。
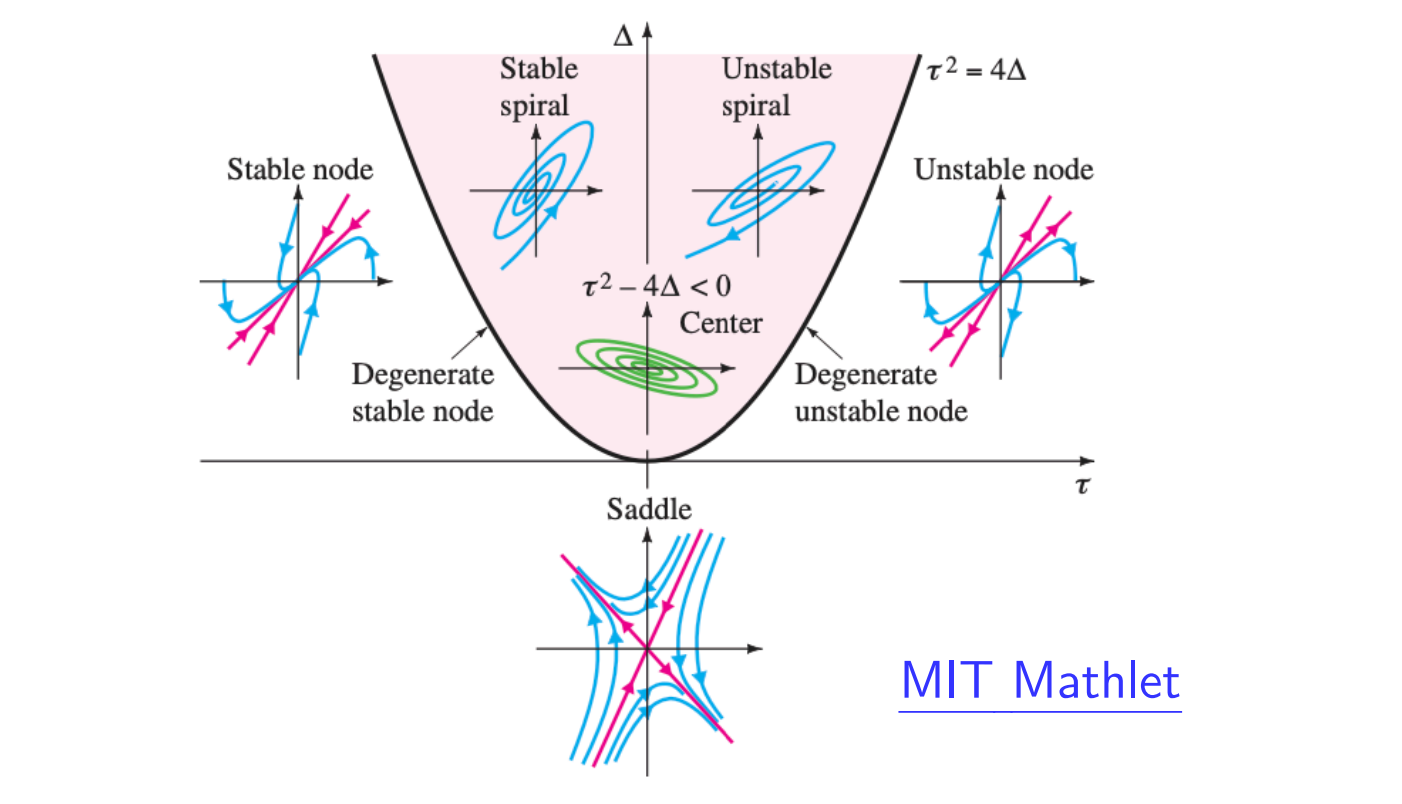
Trace-determinant diagram
设
则特征值满足
这给出著名的 trace-determinant diagram:
- :一定是 saddle;
- :两个实根,node;
- :一对复根,spiral 或 center;
- 且复根:center(线性情形)。
具体地:
- :实部偏负,趋于 stable;
- :实部偏正,趋于 unstable。
所以 trace-determinant plane 可以一张图把 node / saddle / center / spiral 全部总结出来。
Example
写成矩阵:
特征方程为
所以特征值是
两特征值异号,因此原点是 saddle point,而且是 unstable。
这个例子很适合记住:
2D linear system 的 local behavior,本质上又回到了 matrix eigenvalue problem。
Almost linear systems
一般 nonlinear system 在 isolated critical point 附近可以写成
这种情形叫做 almost linear system。
思想上就是:
- 线性部分 决定主要局部结构;
- nonlinear remainder 只是在足够靠近 critical point 时做“小修正”。
因此,多数情况下,nonlinear system 与 linearization 具有相同的局部 type 和 stability。
Two tricky scenarios
线性化并不是在所有情况下都完全决定局部行为。真正麻烦的是两类:
- equal real eigenvalues;
- pure imaginary eigenvalues。
在这两种边界情形下,small perturbation 可能把类型改变:
- center 变成 inward spiral;
- center 变成 outward spiral;
- repeated-root node 变成 node 或 spiral。
所以:
若 eigenvalues 已经清楚地落在 “real parts both negative / both positive / opposite signs” 这些非边界区域,线性化结论通常最可靠。
真正要警惕的是 repeated root 和 pure imaginary 这两类 borderline cases。
Ecological Models: Predators and Competitors
A unified ecological model
先给出一个统一的生态模型:
其中:
- :两种 species 的 populations;
- :线性自然增长/衰减项;
- :self-limitation(logistic inhibition);
- :interaction terms。
根据参数符号不同,它可以描述:
- predation;
- competition;
- cooperation;
- exponential / logistic growth 或 extinction。
Lotka-Volterra predator-prey model
从最经典的 predator-prey model 开始:
这里:
- 是 prey;
- 是 predator。
Critical points
令右端为 0:
得到两个 critical points:
Local meaning
- :两种 species 同时灭绝;
- :非零共存 equilibrium。
对 的 Jacobian 线性化会得到一正一负两个特征值,所以它是 saddle。
对 的 Jacobian 线性化会得到纯虚特征值,所以线性化提示它像 center。
而对标准 Lotka-Volterra model,实际上第一象限中的 trajectories 是包围 的 closed orbits,对应周期振荡。
Oscillating populations
这正是 predator-prey model 的经典结论:
- prey 先增加;
- predator 随后增加;
- prey 又减少;
- predator 再减少;
两个种群 out of phase 地周期 oscillate。
Competition and cooperation
对统一模型
interaction 的符号决定生态意义。
Competition
若
则两边的 项都在降低增长率。
也就是说,两种 species 都被彼此“hurt”,这是 competition。
Cooperation
若
则 interaction 提高了两边的增长率。
两种 species 互相帮助,这是 cooperation。
Predation
若 异号,则一方受害、一方受益。
例如:
- : 是 prey, 是 predator;
- :角色反过来。
另外,若某个 ,则对应 species 在 absence of interaction 时不再是 logistic,而是 exponential growth / decline。
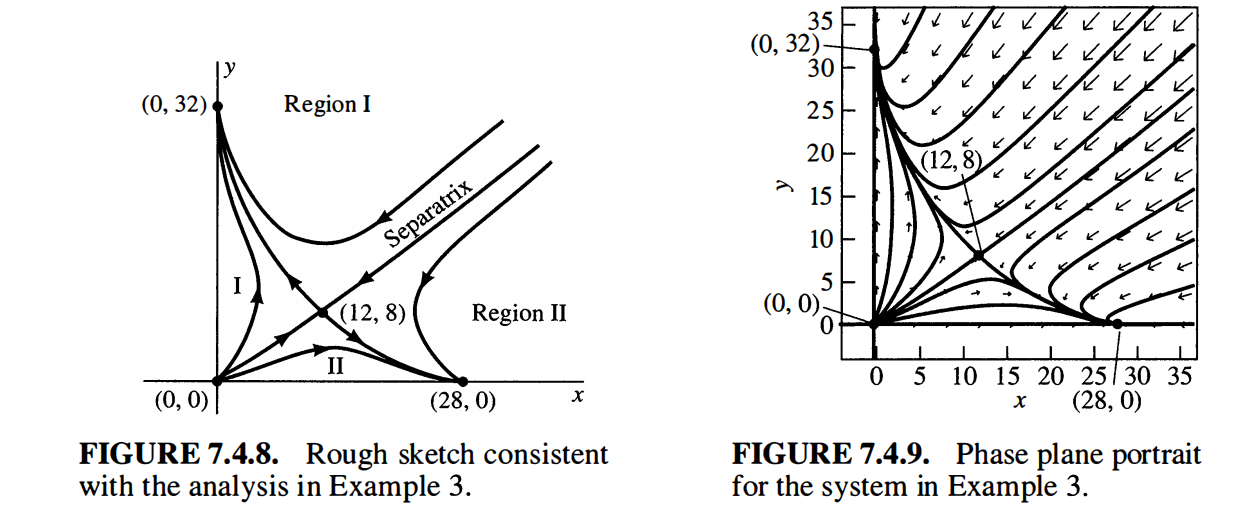
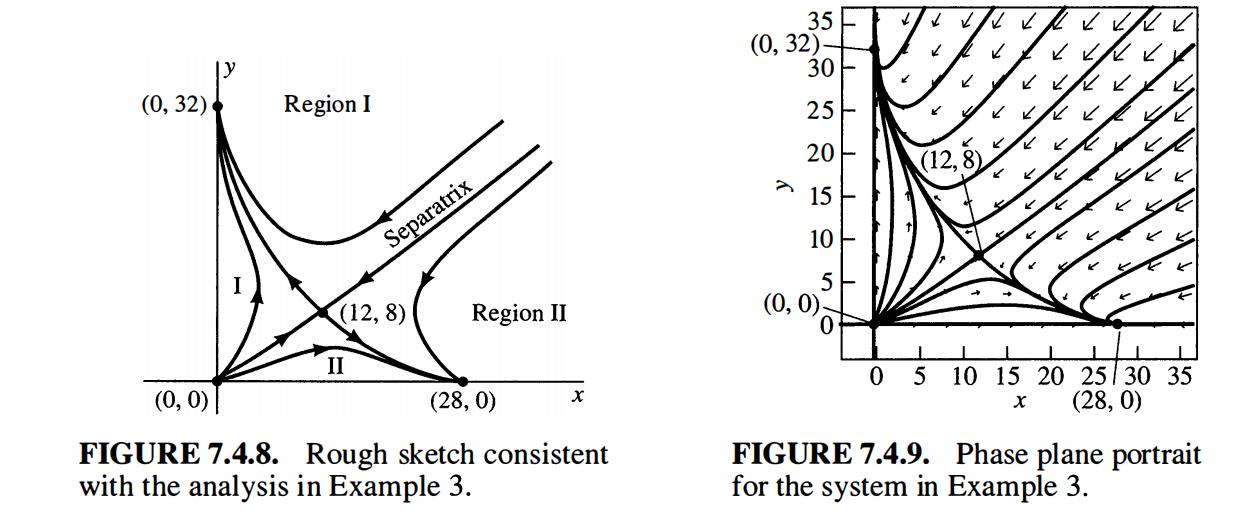
Example: coexistence impossible
一个典型 competition system:
它的四个 critical points 是
线性化分析给出:
- :unstable nodal source;
- :stable nodal sink;
- :stable nodal sink;
- :unstable saddle。
于是 phase portrait 的关键结构是:
- 第一象限内部的 saddle ;
- 经过 saddle 的两条特殊轨道形成 separatrix;
- separatrix 把第一象限分成两个区域。
因此:
- 若初值落在某一区域,,;
- 若初值落在另一区域,,;
- 精确落在 separatrix 上才会趋向 saddle ,但这在实际中几乎不可能。
所以这个系统的结论是:
和平共存不可能,最终总有一方灭绝;哪一方存活取决于初始竞争优势。
Example
peaceful coexistence
再看另一个 competition system:
它的四个 critical points 是
这次局部分类为:
- :unstable nodal source;
- :unstable saddle;
- :unstable saddle;
- :stable nodal sink。
因此只要初值在第一象限内为正,轨道最终都会趋向内部的 coexistence point:
这表示:
两种 species 可以长期稳定共存。
- competition 强于 inhibition coexistence point 往往变成 saddle;
- inhibition 强于 competition coexistence point 往往变成 stable sink。
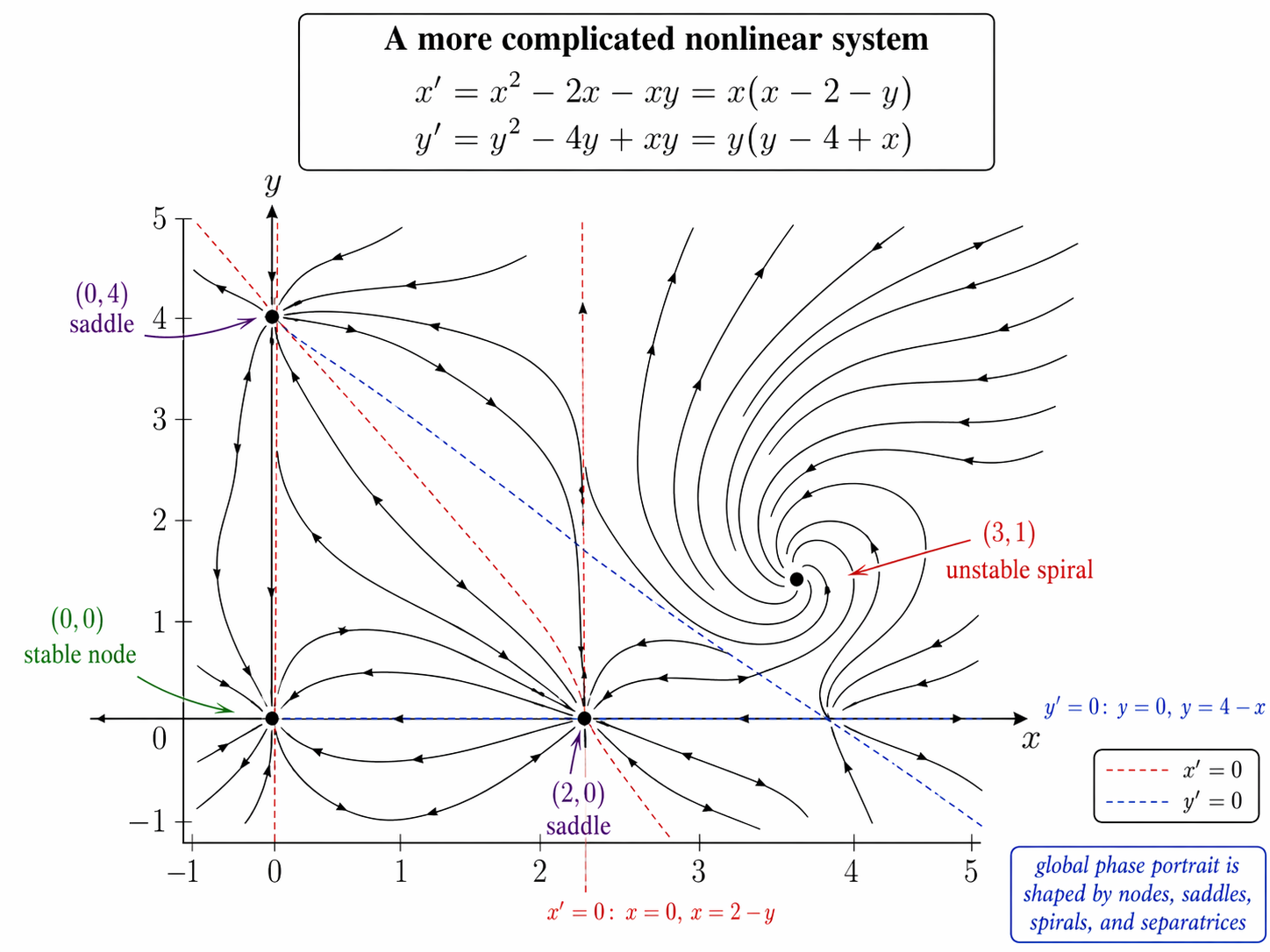
A more complicated scenario
先因式分解:
Critical points
解
得到四个 critical points:
Jacobian
Jacobian 为
逐点代入可得:
- 在
两个负特征值,所以是 stable node。
- 在
特征值异号,所以是 saddle。
- 在
特征值异号,所以也是 saddle。
- 在
特征方程为
故
实部为正,所以是 unstable spiral。
Qualitative picture
因此整个系统的局部结构包含:
- 一个 stable node;
- 两个 saddles;
- 一个 unstable spiral。
这比前面的 textbook competition / predator-prey 图更复杂,也更能说明:
2D nonlinear system 的 global phase portrait 往往由多个 critical points 及其 separatrix 共同拼出来。